700 031 läst · 2 990 svar
700k läst
3,0k svar
Samlingstråd för Worx Landroid 2015 modeller
Damme skrev:Eftersom det finns vissa här inne som inte uppskattar mina försök till reverse-enginering av firmwaren så föreslår jag faktistkt att vi försöker hitta något annat forum, förslagsvis engelska som sagt.
Jag kan själv hosta server men jag tycker att det borde finnas något redan där ute. [länk] har tyvärr inget forum annars hade det varit passande..
Eller varför inte en egen tråd på detta forum typ " Landroid Hack"
Finns säkert en del medlemmar som är intresserade. Om inte så kan man lära sig nått nytt
@Damme,
Det är ingen idé att försöka skriva egen firmware till roboten genom att försöka dra slutsatser om firmware-koden. Det är i princip omöjligt. Det man kan göra är att önska att Worx tillhandahåller något sätt att styra roboten med ett API. Alla försök att flasha in något hemmagjort är att direkt sätta sig själv i klistret då man omöjligt kommer kunna få rätt kontrolsiffor (checksumma). Misslyckas man med att flasha in genom USB-minnet så har man inga fler chanser den vanliga vägen utan att använda sig av ARM's utvecklingsvertyg för Cortex-M serien. Garantin är med största säkerhet förbrukan dessutom. Alla strängar som man kan hitta i filmaren är endast för att visa saker på den inbyggda skärmen och har ingenting att göra med variabler.
Det går inte att sätta några avgörande parametrar från web-interfacet som inte redan är exponerade t.ex storlek på trådgård. Det man kan göra är att logga sensordata som tittar på batteri-procent, körd sträcka osv.
Det är ingen idé att försöka skriva egen firmware till roboten genom att försöka dra slutsatser om firmware-koden. Det är i princip omöjligt. Det man kan göra är att önska att Worx tillhandahåller något sätt att styra roboten med ett API. Alla försök att flasha in något hemmagjort är att direkt sätta sig själv i klistret då man omöjligt kommer kunna få rätt kontrolsiffor (checksumma). Misslyckas man med att flasha in genom USB-minnet så har man inga fler chanser den vanliga vägen utan att använda sig av ARM's utvecklingsvertyg för Cortex-M serien. Garantin är med största säkerhet förbrukan dessutom. Alla strängar som man kan hitta i filmaren är endast för att visa saker på den inbyggda skärmen och har ingenting att göra med variabler.
Det går inte att sätta några avgörande parametrar från web-interfacet som inte redan är exponerade t.ex storlek på trådgård. Det man kan göra är att logga sensordata som tittar på batteri-procent, körd sträcka osv.
Den kollar inga checksummor... Redan ändrat rutinen som säger 'Goodbye' då jag tänkte om jag crashar den så gör det inte så mycket om jag gör det när den skall stängas av..freber skrev:@Damme,
Det är ingen idé att försöka skriva egen firmware till roboten genom att försöka dra slutsatser om firmware-koden. Det är i princip omöjligt. Det man kan göra är att önska att Worx tillhandahåller något sätt att styra roboten med ett API. Alla försök att flasha in något hemmagjort är att direkt sätta sig själv i klistret då man omöjligt kommer kunna få rätt kontrolsiffor (checksumma). Misslyckas man med att flasha in genom USB-minnet så har man inga fler chanser den vanliga vägen utan att använda sig av ARM's utvecklingsvertyg för Cortex-M serien. Garantin är med största säkerhet förbrukan dessutom. Alla strängar som man kan hitta i filmaren är endast för att visa saker på den inbyggda skärmen och har ingenting att göra med variabler.
Det går inte att sätta några avgörande parametrar från web-interfacet som inte redan är exponerade t.ex storlek på trådgård. Det man kan göra är att logga sensordata som tittar på batteri-procent, körd sträcka osv.
Dessutom har jag tillgång till JTAG etc, men tänkte försöka undvika det tills jag råkar 'bricka'.
Men det är mycket trial and error när det gäller alla variablar då jag inte namngett några av dessa än, programmet innahåller många standard C-funktioner och det går att identifiera dessa tämligen lätt
Jag har inga egna kunskaper men väldigt väldigt nyfiken på att följa arbetet!Damme skrev:Eftersom det finns vissa här inne som inte uppskattar mina försök till reverse-enginering av firmwaren så föreslår jag faktistkt att vi försöker hitta något annat forum, förslagsvis engelska som sagt.
Jag kan själv hosta server men jag tycker att det borde finnas något redan där ute. [länk] har tyvärr inget forum annars hade det varit passande..
Roboten har en ganska kapabel CPU (arm cortex-m3 lpc1768) och som ni ser en USB som både klarar master och slave. Min tanke var att bygga lite rutiner så gräsklipparen kör orginalprogrammet primärt men även så man kan koppla in en USB-GPS så körs ett parallelt program som kan påverka orginalprogramet, göra waypoints och även 'stänga' av en zon t.ex.. Vi får se hur detta kommer gå men hittils går det iaf frammåt!
")
Hej allihop.
Jag var precis och köpte mig en WG791E, och jag måste ju säga att jag blev positivt överraskad av att det följde med en USB-sticka med senaste firmware (0.92) i kartongen - ett mycket bra förstaintryck, måste jag säga.
Nu till min undran:
Jag har, som synes nedan, en ganska "besvärlig" tomt som sluttar brant på sina ställen. Jag har inte räknat med att den ska klara av att klippa alltihop, men jag tänkte kolla med er som har erfarenhet av robotklippare (det här är min första) hur långt ner mot vägen som man ska testa att dra begränsningskabeln till att börja med. Vad tror ni?



Eftersom jag, efter att ha läst hela den här tråden, inte har så stort förtroende för mjukvaran, så tänker jag bygga en "avspärrning" emot vägen. Jag tror inte att klipparen hade mått så bra av en flygtur rakt ner i backen från den höjden...
Jag var precis och köpte mig en WG791E, och jag måste ju säga att jag blev positivt överraskad av att det följde med en USB-sticka med senaste firmware (0.92) i kartongen - ett mycket bra förstaintryck, måste jag säga.
Nu till min undran:
Jag har, som synes nedan, en ganska "besvärlig" tomt som sluttar brant på sina ställen. Jag har inte räknat med att den ska klara av att klippa alltihop, men jag tänkte kolla med er som har erfarenhet av robotklippare (det här är min första) hur långt ner mot vägen som man ska testa att dra begränsningskabeln till att börja med. Vad tror ni?


Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder

Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Eftersom jag, efter att ha läst hela den här tråden, inte har så stort förtroende för mjukvaran, så tänker jag bygga en "avspärrning" emot vägen. Jag tror inte att klipparen hade mått så bra av en flygtur rakt ner i backen från den höjden...
Avspärrning är mycket klokt man vet aldrig vad en robot får för sig,källarbacken är nog för brant för att gå upp där
Även en nerförslut har begränsningar,står den mycket på näsan när den skall vänd får den problemen
Prova dig fram lycka till
Även en nerförslut har begränsningar,står den mycket på näsan när den skall vänd får den problemen
Prova dig fram lycka till
Hejmagstorm skrev:
Den klarar dina backar utan problem rent så. MEN men men, den kan inte vända i nedförslutning. Den kommer förr eller senare slira och kasa ner för slänten ut på vägen. Du "måste/bör/jag hade" lagt kabeln inte längre ner än att den vänder där det är plant. tyvärr.
exempel:


Normal vändning, lutar men inte så mycket.
[video=youtube;BSidBxc5Cqc]https://www.youtube.com/watch?v=BSidBxc5Cqc[/video]
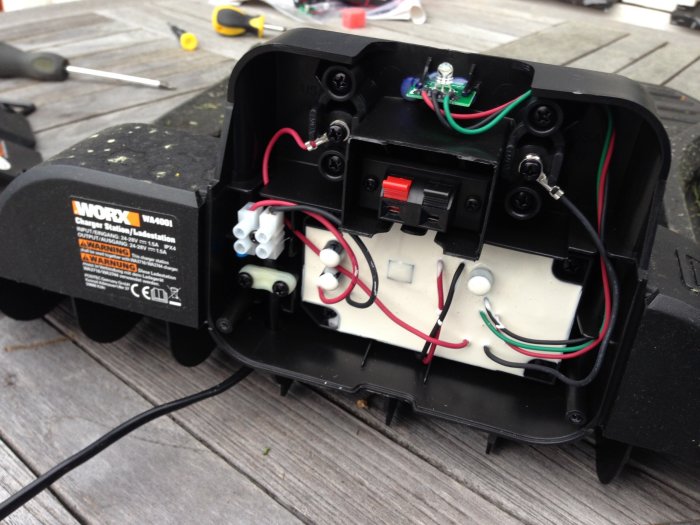
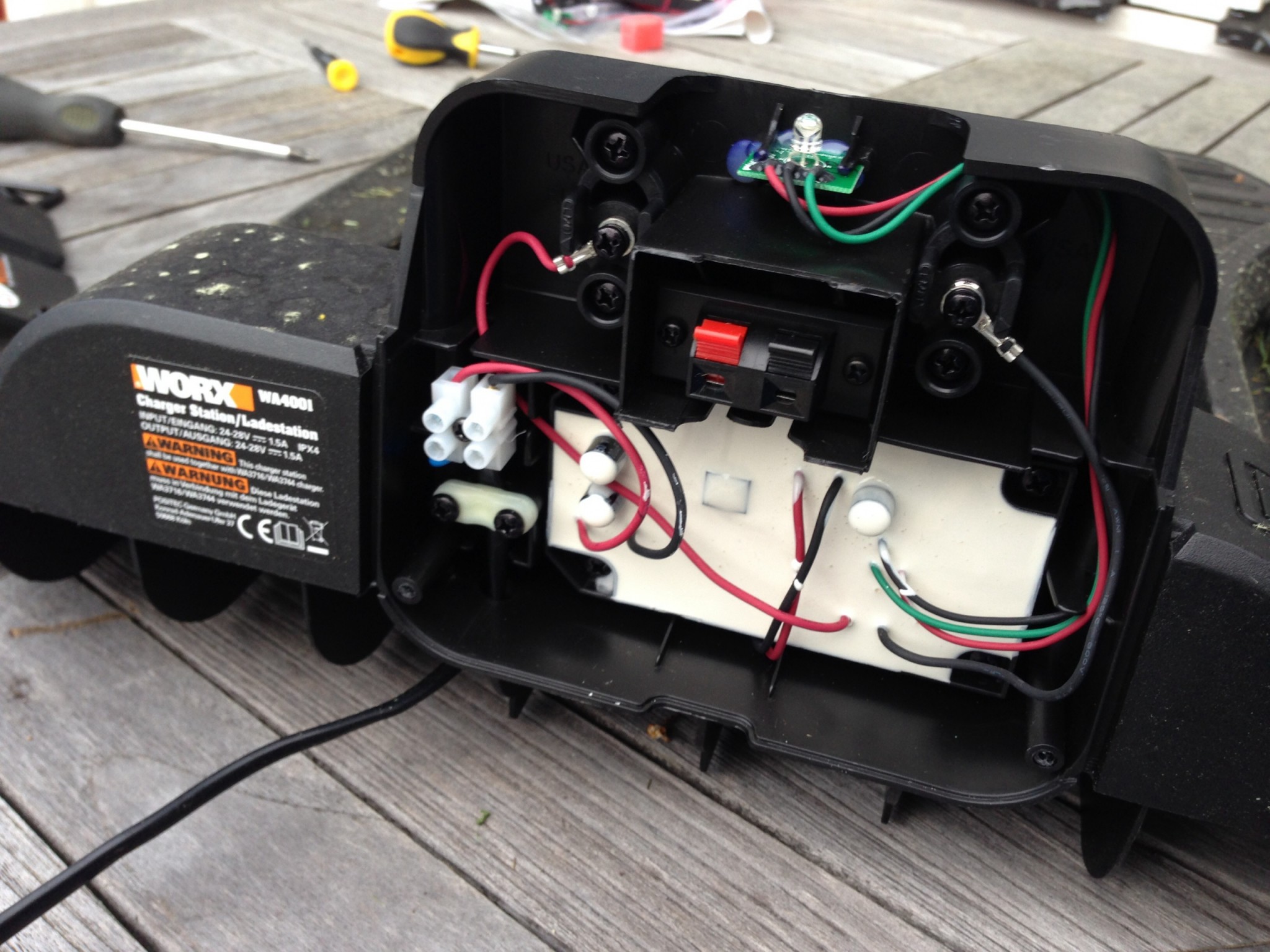
På detta forums inrådan så fick min 796E efter uppgradering till v12.1 också en ny laddningsmodul som Landroid vänligt skickade ut. Min 796E hade verkligen stora problem innan för att hitta begränsningskabeln efter uppgradering til OS 12.1 innan bytet av laddningsmodulen, men efter bytet kan jag lugnt konstatera att maskinen går hur fint som helst. Tack Landroid Supporten för ett kanon bemötande och en fix som funkar hur bra som helst. Inte så svårt att byta, omöjligt och se om man bytt någon krets jämfört med gamla modulen etc då hela modulen är ingjuten. Tog samtidigt och kortade ned laddningskabeln från 10m till 3 m.
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Redigerat:
Min 796E har problemer med at den slår seg av i lade stasjonen på samme vis som andre rapporterer. Har ventet med oppgradering til 12.1 for å få erfaringer fra dere andre om problemet da løser seg. Det ser vel ut til at 12.1 er bedre og planlegger nå å oppgradere til helgen. MEN, i går opplevde jeg for første gang at den stod avslått midt ute på gressplenen. Mørkt display og ingen feilmeldinger. Startet opp på nytt, pin, så start. Den fortsatte så å klippe 5-10 min men stengte seg så av igjen. Samme resultat 3-4 ganger på rad. Batteri ca 75-80% Snakket med support i Norge som sier at jeg bør oppgradere til 12.1 Jeg tror derimot at dette ser ut som HW problem. Noen som opplever det samme?
Redigerat:
freber skrev:
Det jag främst skulle vilja få ut är: Vad klipparen gör just nu (laddar/klipper/söker laddstation) och ev problem (fastnat / lyft) respektive batteri%, så det går nyttja i hemautomation. Något tips?mattiasj78 skrev:
Preben Bogeballe skrev:Tror det finns en hel del medlemmar på byggahus som har intresse för tekniska saker, så det är väl en god tanke att (åtminstone tillfälligt) lägga sidan i parallell tråd så det inte stör de vanliga trådarnas läsning. Håller i sig med om att det skulle finnas fördel med engelskt forum, men det kanske tar en stund att hitta.Damme skrev:Eftersom det finns vissa här inne som inte uppskattar mina försök till reverse-enginering av firmwaren så föreslår jag faktistkt att vi försöker hitta något annat forum, förslagsvis engelska som sagt.
Jag kan själv hosta server men jag tycker att det borde finnas något redan där ute. [länk] har tyvärr inget forum annars hade det varit passande..
Eller varför inte en egen tråd på detta forum typ " Landroid Hack"
Finns säkert en del medlemmar som är intresserade. Om inte så kan man lära sig nått nytt
Hej nån klok!
Har en WG791E som jag tycker betett sig lite konstigt sista veckan;
1) Den har inte klippt på önskad tid
2) När jag skickar ut den manuellt åker den tillbaka till laddningsstationen ganska fort.
Idag upptäckte jag att det stå "Fångad" när den kommer hem till laddningsstationen, det kan ju vara anledningen till att den inte åker iväg i tid men varför blir det så?
Har en WG791E som jag tycker betett sig lite konstigt sista veckan;
1) Den har inte klippt på önskad tid
2) När jag skickar ut den manuellt åker den tillbaka till laddningsstationen ganska fort.
Idag upptäckte jag att det stå "Fångad" när den kommer hem till laddningsstationen, det kan ju vara anledningen till att den inte åker iväg i tid men varför blir det så?
Det är inte regnsensorn som gjort att klipptiderna inte följts?JeRo skrev:Hej nån klok!
Har en WG791E som jag tycker betett sig lite konstigt sista veckan;
1) Den har inte klippt på önskad tid
2) När jag skickar ut den manuellt åker den tillbaka till laddningsstationen ganska fort.
Idag upptäckte jag att det stå "Fångad" när den kommer hem till laddningsstationen, det kan ju vara anledningen till att den inte åker iväg i tid men varför blir det så?
Rengjort laddningsstiften med tex t-röd? (Akta plasten)
Löper kablarna korrekt vid laddningsstationen? Ej korsade bakom o ingen extrakabel som skräpar där?
Strömsladden som går till stationen kan inte heller ligga i en bunte utan behöver dras ut så att den inte ligger i cirklar (skapar magnetfält som kan störa har jag för mig)