285 626 läst · 1 235 svar
286k läst
1,2k svar
Worx Landroid 2016
Nu funkar wifi. Men hur funkar uppdelningen av "zon" man ska tydligen ange i D1 och D2. Tex jag har en framsida som det tar ett tag för roboten att komma till. Då ska jag kunna ställa in så den åker efter begränsningskabeln i 100meter sen klippa där? Alltså sätta 50 på framsidan sen 50 på baksidan? Roboten står på baksidan.
Kommer den köra varannan gång efter laddning på zon ett sen varannan gång zon två eller hur funkar det?
Kan någon förklara detta smidigt?
Kommer den köra varannan gång efter laddning på zon ett sen varannan gång zon två eller hur funkar det?
Kan någon förklara detta smidigt?
Huvudet på spiken. Av någon anledning måste första zonen vara 1 meter, återstående zoner är hur många meter den ska rulla längs med kabeln innan den börjar klippa. Klipparen har dock ingen aning om vilken zon den befinner sig i, så den kan mycket väl klippa i "fel" zon trots att den startade i rätt.jonaslatt skrev:Nu funkar wifi. Men hur funkar uppdelningen av "zon" man ska tydligen ange i D1 och D2. Tex jag har en framsida som det tar ett tag för roboten att komma till. Då ska jag kunna ställa in så den åker efter begränsningskabeln i 100meter sen klippa där? Alltså sätta 50 på framsidan sen 50 på baksidan? Roboten står på baksidan.
Kommer den köra varannan gång efter laddning på zon ett sen varannan gång zon två eller hur funkar det?
Kan någon förklara detta smidigt?
Kanon. Och tack för alla snabba svar. Är som sagt helt ny på detta. Men nu när man äntligen har byggt klart huset och fått en grön gräsmatta tyckte jag att jag hade förtjänat denna dräng.. Kommer säker återkomma med fler frågor.
Ronaldo, 791e.1 med SW 2.01, har nu jobbat hos mig i två veckor.
Gräsmattan är på omkring 500 m2 med slänter längs två sidor, en studsmatta, en smal passage till en långsmal grästarm på baksidan.
Erfarenheter så långt.
Automatiskt schema fungerade av någon anledning aldrig. Den stod bara i sitt bo och fick startas manuellt. När jag programmerade eget schema så har det fungerat perfekt.
Slänter: Inte hans starka sida. Två problem som jag ser det. Emellanåt ska han ju köra längs kanttråden och då blir det svajigt på slänten. Problemet tror jag är att den drar på maxfart direkt när den centrerat över tråden. Med lutningen som bråkar då så kommer den direkt rejält ur kurs, stannar, backar/vrider/gräver etc. Två sekunder i långsam hastighet längs tråden hade gjort susen tror jag. Andra problemet är att slänt två är kanske brant i överkant. Under klippning i nedförsbacke går det för fort så den tvärnitar/kör/tvärnitar etc. Smäller en del från drivningen, låter inte trevligt. Tror även här att det är fullgas direkt som spökar. Nu har jag dragit om tråden så jag inte klipper den slänten. Finns det gyro i den? I så fall tror jag på lägre hastighet som default över viss lutning. Hade gjort underverk!
Arbetsområden: Smal passage som sagt, fungerar bra att ange sträcka så börjar den där borta emellanåt.
Klippresultat: Klart godkänt. Men ganska tydliga hjulspår längs begränsningskabeln.
Laddstationen: Inga problem att docka men när den råkar komma mot laddstationen under klippning är den väldigt hårdhänt. Får fästa den bättre.
Rekommenderar jag Worx till andra? Har du en plan gräsmatta tror jag den är bra, har du slänter längs begränsningkabeln är jag mer tveksam med nuvarande funktionalitet. För en plan gräsmatta ser jag bara risken med hjulspår i kanten. Är man känslig för det kvarstår väl bara Husqvarna och deras rövarpriser...
Gräsmattan är på omkring 500 m2 med slänter längs två sidor, en studsmatta, en smal passage till en långsmal grästarm på baksidan.
Erfarenheter så långt.
Automatiskt schema fungerade av någon anledning aldrig. Den stod bara i sitt bo och fick startas manuellt. När jag programmerade eget schema så har det fungerat perfekt.
Slänter: Inte hans starka sida. Två problem som jag ser det. Emellanåt ska han ju köra längs kanttråden och då blir det svajigt på slänten. Problemet tror jag är att den drar på maxfart direkt när den centrerat över tråden. Med lutningen som bråkar då så kommer den direkt rejält ur kurs, stannar, backar/vrider/gräver etc. Två sekunder i långsam hastighet längs tråden hade gjort susen tror jag. Andra problemet är att slänt två är kanske brant i överkant. Under klippning i nedförsbacke går det för fort så den tvärnitar/kör/tvärnitar etc. Smäller en del från drivningen, låter inte trevligt. Tror även här att det är fullgas direkt som spökar. Nu har jag dragit om tråden så jag inte klipper den slänten. Finns det gyro i den? I så fall tror jag på lägre hastighet som default över viss lutning. Hade gjort underverk!
Arbetsområden: Smal passage som sagt, fungerar bra att ange sträcka så börjar den där borta emellanåt.
Klippresultat: Klart godkänt. Men ganska tydliga hjulspår längs begränsningskabeln.
Laddstationen: Inga problem att docka men när den råkar komma mot laddstationen under klippning är den väldigt hårdhänt. Får fästa den bättre.
Rekommenderar jag Worx till andra? Har du en plan gräsmatta tror jag den är bra, har du slänter längs begränsningkabeln är jag mer tveksam med nuvarande funktionalitet. För en plan gräsmatta ser jag bara risken med hjulspår i kanten. Är man känslig för det kvarstår väl bara Husqvarna och deras rövarpriser...
Göra "inverterade" öar för att minska sträckan för trådföljning?
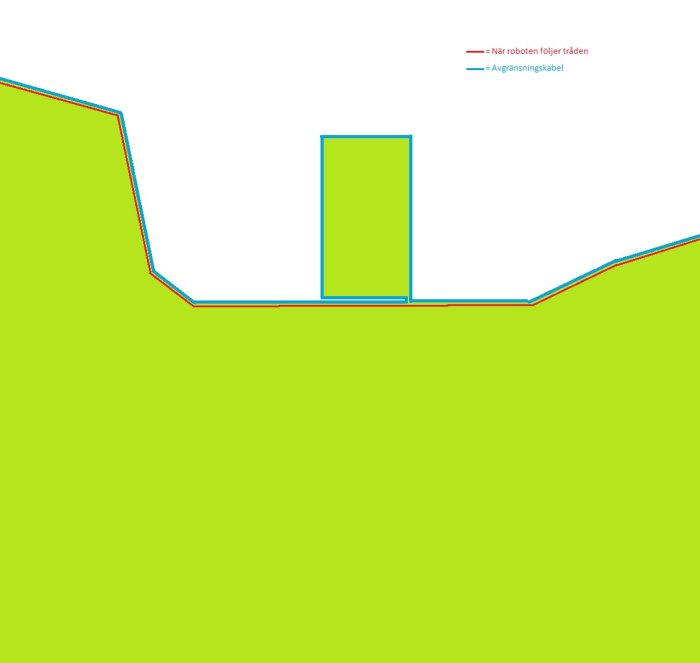
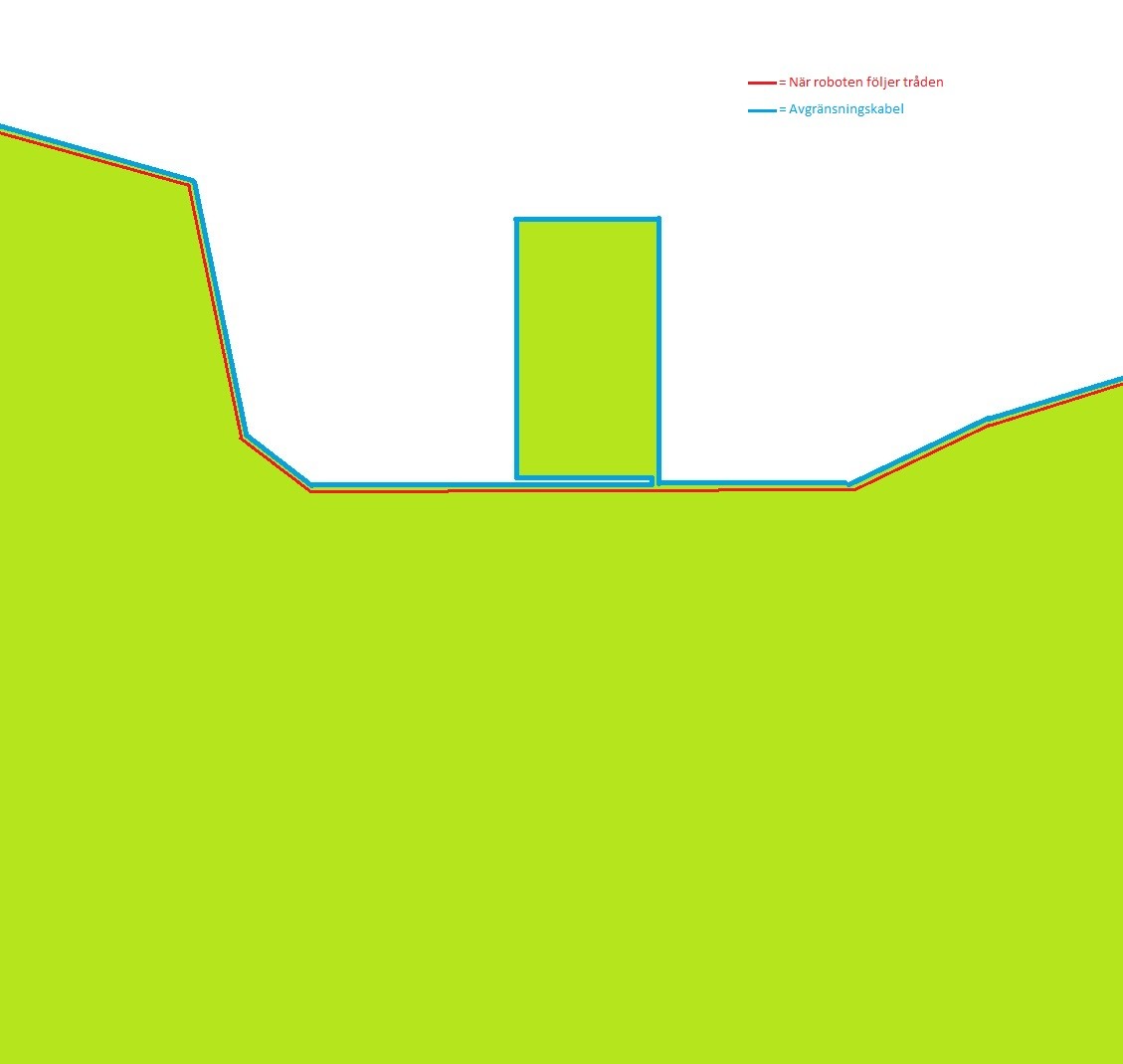
Går det att avgränsa områden som "inverterade" öar för att minska sträckan roboten behöver åka när den ska hem för laddning (och kantklippning)? Vi har en tomt som är rätt komplicerad när det gäller gräs osv så en sådan lösning skulle passa väldigt bra för oss.
Jag har bifogat en bild där jag försöker visa hur jag menar. Min fråga är eg. hur roboten agerar när den följer avgränsningstråden och kommer till området i mitten. (Samt givetvis hur den agerar när den är ute och klipper och träffar på området i mitten men där borde den åka över trådarna som den gör med "vanliga" öar tycker jag)
Går det att avgränsa områden som "inverterade" öar för att minska sträckan roboten behöver åka när den ska hem för laddning (och kantklippning)? Vi har en tomt som är rätt komplicerad när det gäller gräs osv så en sådan lösning skulle passa väldigt bra för oss.
Jag har bifogat en bild där jag försöker visa hur jag menar. Min fråga är eg. hur roboten agerar när den följer avgränsningstråden och kommer till området i mitten. (Samt givetvis hur den agerar när den är ute och klipper och träffar på området i mitten men där borde den åka över trådarna som den gör med "vanliga" öar tycker jag)
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Redigerat:
Nu har jag en ny fråga angående min WG796E . Jag delade upp den i två områden (zoner) men den åker alltid bara ut och börjar klippa. Den åker aldrig till zon 2. Jag läste manuell och det stod att man kunde följa roboten när den körde runt gränstråden sen stoppa den där man ville ha zon 2. Och klicka på 2an. Jag gjorde detta men det står ingen. Jag kommer in i programmet som ska visa men det står inget längst ner där. Varför? Vad kan det bero på?
Inte så lätt att förstå dig exakt men som jag förstått det får du bara ut avståndet genom att trycka på tvåan. Sedan får du ange det avståndet manuellt i menyn Arbetsområden. För mig funkar det men jag höftide bara en sträcka och kollade sen hur Ronaldo skötte sig. Behövde inte justera utan hade helrätt från början.jonaslatt skrev:Nu har jag en ny fråga angående min WG796E . Jag delade upp den i två områden (zoner) men den åker alltid bara ut och börjar klippa. Den åker aldrig till zon 2. Jag läste manuell och det stod att man kunde följa roboten när den körde runt gränstråden sen stoppa den där man ville ha zon 2. Och klicka på 2an. Jag gjorde detta men det står ingen. Jag kommer in i programmet som ska visa men det står inget längst ner där. Varför? Vad kan det bero på?
")
Arbetsområden, antal zoner = 2. Ange sträcka där det är lämpligt att börja klippa i område 2. Ange även procentuellt hur ofta den ska börja i de olika arbetsområdena. Summan av procenten ska så klart bli 100.
Jag skrev in manuell 50 område 1. 50%område 2. Men när inte detta gick så fanns det en inställning som roboten själv räknade ut hur många meter det skulle va till område 2 men inte ens då förstår den. Där roboten ska visa antal meter står det (inget).
Troligen därför inställningen inte funkar. Frågan e varför den inte funkar.
Troligen därför inställningen inte funkar. Frågan e varför den inte funkar.
Redigerat:
Läs tidigare i tråden om Zoninställning!jonaslatt skrev:Jag skrev in manuell 50 område 1. 50%område 2. Men när inte detta gick så fanns det en inställning som roboten själv räknade ut hur många meter det skulle va till område 2 men inte ens då förstår den. Där roboten ska visa antal meter står det (inget).
Troligen därför inställningen inte funkar. Frågan e varför den inte funkar.
Någon som vet om Worx använder 2,4 eller 5 GHz för Wif?
Antar att det är 2,4 men någon kanske vet säkert.
Tänkte montera en accesspunkt och en utomhusantenn för att få bättre täckning i trädgården.
Antar att det är 2,4 men någon kanske vet säkert.
Tänkte montera en accesspunkt och en utomhusantenn för att få bättre täckning i trädgården.
Min Worx 790 E1 fungerar i stort sett helt ok, men den beter sig som ett fyllo när den försöker följa kabeln vid hemgång.
Därför skulle jag vilja prova att uppdatera till firmware 2.01 då jag förstått att den gör så klipparen följer kabeln bättre.
Men för säkerhets skull vill jag ha möjlighet att kunna backa tillbaka till original firmware, som är 1.58 i min klippare.
Är det någon som vet var man kan hitta firmware 1.58? Jag har googlat en hel del men inte kunnat hitta fw 1.58.
Är tacksam ifall någon som kanske har fw 1.58 kan maila den till mig, eller lägga ut den någonstans för nerladdning.
Därför skulle jag vilja prova att uppdatera till firmware 2.01 då jag förstått att den gör så klipparen följer kabeln bättre.
Men för säkerhets skull vill jag ha möjlighet att kunna backa tillbaka till original firmware, som är 1.58 i min klippare.
Är det någon som vet var man kan hitta firmware 1.58? Jag har googlat en hel del men inte kunnat hitta fw 1.58.
Är tacksam ifall någon som kanske har fw 1.58 kan maila den till mig, eller lägga ut den någonstans för nerladdning.