Jag tänkte skapa en liten tråd som förhoppningsvis någorlunda pedagogiskt tar upp funktionen hos en trefas asynkronmotor.

Några asynkronmotorer med typiskt utseende för de senaste decennierna.
Asynkrommotorn heter ofta i mer nördiga eller tekniska sammanhang asynkronmaskin.
Induktionsmotor är ett annat vanligt namn. Och ordet "kortsluten" är också ibland instoppat någonstans i namnet pga principen att rotorlindningen är just kortsluten.
Ett vanligt utseende är liknande det på bilden. Men de modernaste och även riktigt gamla kan skilja sig en hel del utseendemässigt.
Man finner dessa väldigt mycket i verkstad och industri, där motortypen måste sägas vara helt dominerande.
I hus och hem är denna motortyp inte så väldigt vanlig.
Den återfinns på trefaskompressorn i garaget, på trefas klyvsågar, i trefas värmepumpar.
En trefas asynkronmotor går att modifiera och köras på enfas med hjälp av en kondensator, och på det viset så går det även hitta dessa motorer i enfasprylar såsom enfas klyvsåg/kompressor, kyl/frys-skåp m.m.
Borrmaskiner, elvispar, kap/ger-sågar osv har som regel inte denna motortyp. Utan där sitter det för det mesta en shunt-motor eller en universalmotor. Har motorn ifråga kolborstar/släpringar så är det inte en asynkronmotor.

Några asynkronmotorer med typiskt utseende för de senaste decennierna.
Asynkrommotorn heter ofta i mer nördiga eller tekniska sammanhang asynkronmaskin.
Induktionsmotor är ett annat vanligt namn. Och ordet "kortsluten" är också ibland instoppat någonstans i namnet pga principen att rotorlindningen är just kortsluten.
Ett vanligt utseende är liknande det på bilden. Men de modernaste och även riktigt gamla kan skilja sig en hel del utseendemässigt.
Man finner dessa väldigt mycket i verkstad och industri, där motortypen måste sägas vara helt dominerande.
I hus och hem är denna motortyp inte så väldigt vanlig.
Den återfinns på trefaskompressorn i garaget, på trefas klyvsågar, i trefas värmepumpar.
En trefas asynkronmotor går att modifiera och köras på enfas med hjälp av en kondensator, och på det viset så går det även hitta dessa motorer i enfasprylar såsom enfas klyvsåg/kompressor, kyl/frys-skåp m.m.
Borrmaskiner, elvispar, kap/ger-sågar osv har som regel inte denna motortyp. Utan där sitter det för det mesta en shunt-motor eller en universalmotor. Har motorn ifråga kolborstar/släpringar så är det inte en asynkronmotor.
Motorn är smått genial i sin konstruktion, då den saknar släpringar och kol så blir den väldigt underhållsfri. Det är ofta först när man har fått lagerproblem som man behöver göra något. Och bra motorer med bra lager håller läääänge. Jag tar ner motorer som gått i fläktaggregat 24/7 i över 20 år, som fortfarande är fullt funkis och fräscha.
Motorns varvtal är relativt fixt. Det beror i princip endast på elmatningens frekvens och antal poler som motorn är lindad med. Det lägsta antalet poler är en tvåpolig motor, som går i 3000 rpm vid 50Hz nätfrekvens. En 4-polig går i 1500RPM, en 6-polig i 1000 RPM. Det är rätt ovanligt med 6-poliga, och ännu ovanligare med ännu högre poltal.
Men motorn har alltid en liten eftersläpning som beror till viss del på lasten, och den är häraden 1-6% på ett ungefär.
Motorn är alltså i princip omöjlig att hastighetsreglera på annat sätt än att ändra nätfrekvensen, vilket man helt sonika ofta gör idag då, med hjälp av en frekvensomriktare.

Motorns varvtal är relativt fixt. Det beror i princip endast på elmatningens frekvens och antal poler som motorn är lindad med. Det lägsta antalet poler är en tvåpolig motor, som går i 3000 rpm vid 50Hz nätfrekvens. En 4-polig går i 1500RPM, en 6-polig i 1000 RPM. Det är rätt ovanligt med 6-poliga, och ännu ovanligare med ännu högre poltal.
Men motorn har alltid en liten eftersläpning som beror till viss del på lasten, och den är häraden 1-6% på ett ungefär.
Motorn är alltså i princip omöjlig att hastighetsreglera på annat sätt än att ändra nätfrekvensen, vilket man helt sonika ofta gör idag då, med hjälp av en frekvensomriktare.

Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
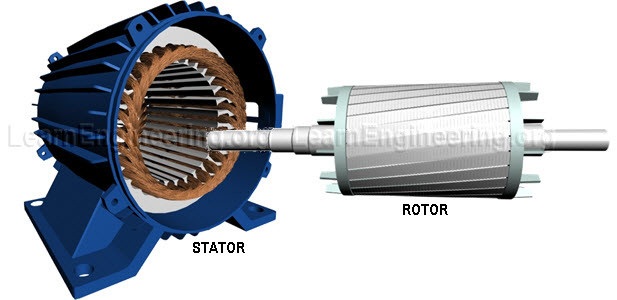
Asynkronmotorn är principiellt bara konstruerad med ett motorhus som utgör stator och statorlindningar samt en rotor med en kortsluten "lindning".
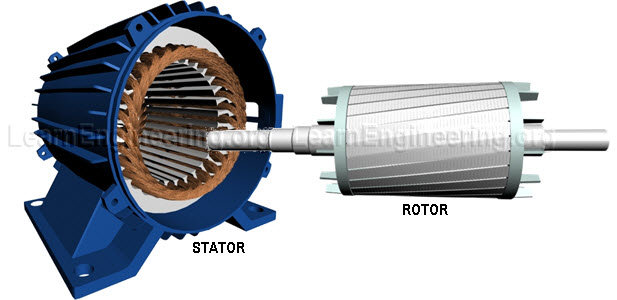
Självklart är det en massa fler delar, lager, sidostycken, fläkt, skyddskåpa för fläkten, anslutningsbox osv.
Men för att förstå funktionen behöver vi endast koncentrera oss på statorn och rotorn.
Statorn är för bästa funktion och verkningsgrad relativt intrikat lindad, men för förståelse är en förenklad bild att föredra:
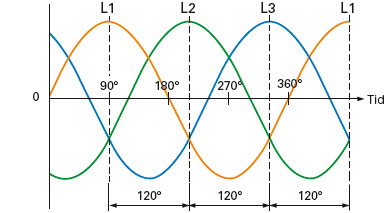
Då lindningarna matas med trefas ström, som alltså är 120° fasförskjuten mellan varje fas:
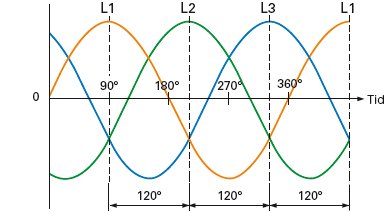
Så kommer det att bli vad vi kallar ett roterande magnetfält inne i statorn.
Tänk att först når ena statorspolen den fasens ström och spänningstopp = max magnetfält, sen 1/3 av 50Hz senare (120° senare på varvet) så når nästa statorspole sin magnetiska topp, och sen ytterligare 120° senare får den tredje spolen en magnetisk topp, och på det viset går det runt runt.
Detta magnetfält säger vi att det roterar med synkront varvtal, dvs ingen eftersläpning, utan helt och hållet bestämt av nätfrekvensen (en 2 polig motor -> 50Hz * 60 s/ minut = 3000 varv/minut)
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Självklart är det en massa fler delar, lager, sidostycken, fläkt, skyddskåpa för fläkten, anslutningsbox osv.
Men för att förstå funktionen behöver vi endast koncentrera oss på statorn och rotorn.
Statorn är för bästa funktion och verkningsgrad relativt intrikat lindad, men för förståelse är en förenklad bild att föredra:
Då lindningarna matas med trefas ström, som alltså är 120° fasförskjuten mellan varje fas:
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Så kommer det att bli vad vi kallar ett roterande magnetfält inne i statorn.
Tänk att först når ena statorspolen den fasens ström och spänningstopp = max magnetfält, sen 1/3 av 50Hz senare (120° senare på varvet) så når nästa statorspole sin magnetiska topp, och sen ytterligare 120° senare får den tredje spolen en magnetisk topp, och på det viset går det runt runt.
Detta magnetfält säger vi att det roterar med synkront varvtal, dvs ingen eftersläpning, utan helt och hållet bestämt av nätfrekvensen (en 2 polig motor -> 50Hz * 60 s/ minut = 3000 varv/minut)
OK, då har vi en stator med ett roterande magnetfält i.
Då slänger vi in rotorn där.
Rotorn är en verkligt underlig tingest för de som kan lite om el och ström, men inget om asynkronmaskinen.")
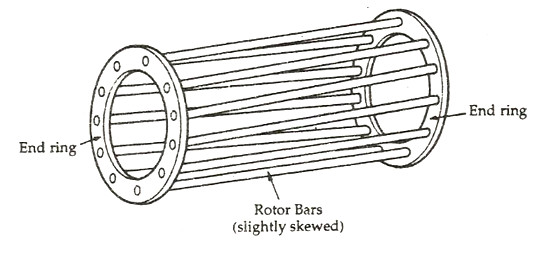
Den är i princip konstruerad såhär, gjord i koppar eller aluminium, bara lite isolerande material mellan som man bygger upp det på.
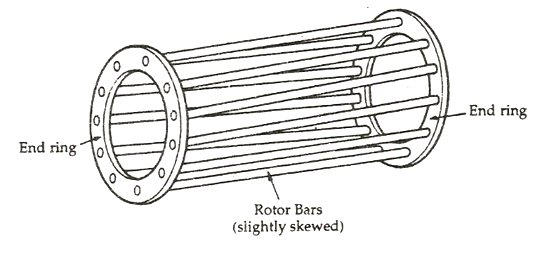
Men hur kan detta fungera. grova kopparstänger som bara är kortslutna i alla ändar. Även ringen i ändarna är alltså ledande i koppar eller alu.
Jo det är detta som är så finurligt. När magnetfältet rör sig förbi en av dessa kortslutna stänger så induceras det en ström i stången, det blir en ström just för att det är kortslutet, annars skulle det inte fungera.
Och när det löper en ström där så skapar samma ström ett motriktat magnetfält, som ger upphov till en kraft som vill vrida runt rotorn.
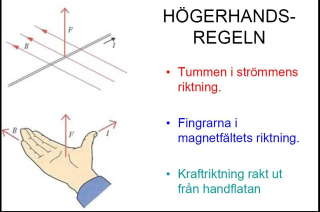
Prova med de två högerhandsreglerna:
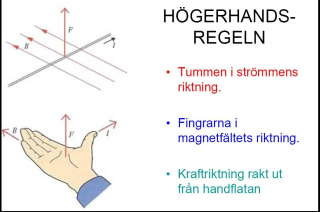
Jag är dock lite osäker på om det är såhär man har rätt att beskriva det. Det finns ett fysikaliskt/induktivt fenomen att det blir en motkraft direkt när man försöker inducera i ett magnetfält. Att gå genom mellanledet och se en ström, som sen i sin tur ger upphov till kraften är jag inte helt säker på att det är korrekt. Men jag tror det dock.
Nåväl, resultatet är dock detsamma, det blir ett vridande moment i rotorn som försöker få den i rörelse åt samma håll som det roterade magnetfältet.
Och då magnetfältet roterar snabbt förbi rotorn vid starten så blir det en stark induktion och därmed ett högt vridmoment = asynkronmotorn har ett ganska bra startmoment.
Då slänger vi in rotorn där.
Rotorn är en verkligt underlig tingest för de som kan lite om el och ström, men inget om asynkronmaskinen.
Den är i princip konstruerad såhär, gjord i koppar eller aluminium, bara lite isolerande material mellan som man bygger upp det på.
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Men hur kan detta fungera. grova kopparstänger som bara är kortslutna i alla ändar. Även ringen i ändarna är alltså ledande i koppar eller alu.
Jo det är detta som är så finurligt. När magnetfältet rör sig förbi en av dessa kortslutna stänger så induceras det en ström i stången, det blir en ström just för att det är kortslutet, annars skulle det inte fungera.
Och när det löper en ström där så skapar samma ström ett motriktat magnetfält, som ger upphov till en kraft som vill vrida runt rotorn.
Prova med de två högerhandsreglerna:
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Jag är dock lite osäker på om det är såhär man har rätt att beskriva det. Det finns ett fysikaliskt/induktivt fenomen att det blir en motkraft direkt när man försöker inducera i ett magnetfält. Att gå genom mellanledet och se en ström, som sen i sin tur ger upphov till kraften är jag inte helt säker på att det är korrekt. Men jag tror det dock.
Nåväl, resultatet är dock detsamma, det blir ett vridande moment i rotorn som försöker få den i rörelse åt samma håll som det roterade magnetfältet.
Och då magnetfältet roterar snabbt förbi rotorn vid starten så blir det en stark induktion och därmed ett högt vridmoment = asynkronmotorn har ett ganska bra startmoment.
Så en liten delmålssammafattning.
I statorn bildas det ett roterande magnetfält, entydigt bestämt av frekvensen på strömmen och poltalet på motorn.
Magnetfältet påverkar de kortslutna lindningarna på rotorn så den dras med åt samma håll som magnetfältet.
Det blir alltid lite eftersläpning på rotorn jämfört med magnetfältets varvtal. I en obelastad ideal motor helt utan förluster och motstånd skulle det synkrona varvtalet i magnetfältet och rotorns varvtal bli exakt detsamma, dvs motorn skulle teoretiskt kunna gå synkront. Men det finns alltid lite motstånd och förluster, som gör att det krävs lite vridmoment för att hålla rotorn igång = det blir eftersläpning.
Vid korrekt drift av motorn (inte överbelastning) är vridmomentet och eftersläpningen relativt linjära mot varandra. Ökar man lasten (vridmomentet) så sjunker varvtalet (mer eftersläpning) tills skillnaden mellan synkront magnetfält och asynkront varvtal på rotorn har ökat tillräckligt mycket att vridmomentet blivit tillräckligt högt.
Asynkronmotorn är alltså helt självreglerande. Den går aldrig snabbare än synkront varvtal, men varvtalat sjunker lite för att möta ökat vridmomentbehov.
to be continued ...
I statorn bildas det ett roterande magnetfält, entydigt bestämt av frekvensen på strömmen och poltalet på motorn.
Magnetfältet påverkar de kortslutna lindningarna på rotorn så den dras med åt samma håll som magnetfältet.
Det blir alltid lite eftersläpning på rotorn jämfört med magnetfältets varvtal. I en obelastad ideal motor helt utan förluster och motstånd skulle det synkrona varvtalet i magnetfältet och rotorns varvtal bli exakt detsamma, dvs motorn skulle teoretiskt kunna gå synkront. Men det finns alltid lite motstånd och förluster, som gör att det krävs lite vridmoment för att hålla rotorn igång = det blir eftersläpning.
Vid korrekt drift av motorn (inte överbelastning) är vridmomentet och eftersläpningen relativt linjära mot varandra. Ökar man lasten (vridmomentet) så sjunker varvtalet (mer eftersläpning) tills skillnaden mellan synkront magnetfält och asynkront varvtal på rotorn har ökat tillräckligt mycket att vridmomentet blivit tillräckligt högt.
Asynkronmotorn är alltså helt självreglerande. Den går aldrig snabbare än synkront varvtal, men varvtalat sjunker lite för att möta ökat vridmomentbehov.
to be continued ...
Redigerat:
Riktigt bra början och pedagogiskt också. Kanske du kan ta med lite mer kring hur man kan inse att fältet roterar och om vad som utmärker trefas där. Och glöm inte bort den kanske viktigaste komponenten i våra EM-maskiner dvs järnet, saknas särskilt som en del i rotorbeskrivningen, ja självklart i statorn också.
Väldigt bra genomgång. Jag är minst sagt lite rostig på motorteorin.
Skulle du kunna berätta lite om enfasdrivna asynkronmotorer också (alltså med kondensator)?
Skulle du kunna berätta lite om enfasdrivna asynkronmotorer också (alltså med kondensator)?
Tackar.GK100 skrev:Riktigt bra början och pedagogiskt också. Kanske du kan ta med lite mer kring hur man kan inse att fältet roterar och om vad som utmärker trefas där. Och glöm inte bort den kanske viktigaste komponenten i våra EM-maskiner dvs järnet, saknas särskilt som en del i rotorbeskrivningen, ja självklart i statorn också.
Jag tänkte närmast fortsätta med lite om inkoppling, rotationsriktning, och lite formler på fasvridningar, effekter, verkningsgrad, eftersläpning och allt det där. Jag måste dock öppna min elkraftteknikbok och fräscha upp minnet lite först.
Sen hoppas jag att någon som kan det här med standardiserade montage och formfaktorer kan göra ett inlägg om detta.
Vad det gäller mer om det roterande fältet och järnets betydelse så överlåter jag med varm hand till dig GK100 att fylla på med mer.
Ett järn kanske jag kan ta mig ikväll, men där slutar min kunskap.
Just denna sak hoppas jag också på att få någon annan författare till.hempularen skrev:
Visst kan jag skriva något lite om det, men jag kan i princip ingen teori (om det finns någon).
Man kan ju öht ifrågasätta en såhär djuplodande tråd om asynkronmotorer på byggahus, då det är en motor som ändå är relativt ovanlig i våra hus.
Man va tusan, om suturer, nålar och sårkanter när man syr i människor har lyckats få en plats på forumet, och att hur man lurar moderna bilar att acceptera LED-lampor har flugit under modereringsradarn här, så kan väl lite trefasmotorer också få avhandlas här utan att man behöver skämmas.

Tack Mikael för tråden.
Den här typen av kunskap tror jag det är många som önskar sig, kanske främst de som inte gått någon El-linje i skolan
( de andra borde ju redan veta om de inte glömt ;-) ).
Den här typen av kunskap tror jag det är många som önskar sig, kanske främst de som inte gått någon El-linje i skolan
( de andra borde ju redan veta om de inte glömt ;-) ).
Jag är lite extra nyfiken på kondensatordrift, för jag hjälpte en bekant häromdagen.
Hon är guldsmed och hennes "valsverk", en maskin på ca ett ton. Hade slutat fungera. En elfirmor hade erbjudit felsökning för 6000. Jag hittade felet på 5 minuter. En tråd till kondensatorn hade vibrerat av.
Hon har fått den lagad förut. Då hade kondensatorn bytts ut. Därav en koppling som kunde gå av. Den nya var på 100 uF. Misstänker att den var ngt reparatören råkade ha. Kan vara fel värde.
Hon är guldsmed och hennes "valsverk", en maskin på ca ett ton. Hade slutat fungera. En elfirmor hade erbjudit felsökning för 6000. Jag hittade felet på 5 minuter. En tråd till kondensatorn hade vibrerat av.
Hon har fått den lagad förut. Då hade kondensatorn bytts ut. Därav en koppling som kunde gå av. Den nya var på 100 uF. Misstänker att den var ngt reparatören råkade ha. Kan vara fel värde.
Ja en bild säger mer än .... brukar det ju heta vad gör då inte en massa bilder i följd, dvs en GIF-animering. För den som inte är så matematiskt intresserad eller bevandrad säger inte diverse iofs ganska lättåtkomliga formler så mycket. Brukar gälla resonemangen kring olika roterande fält i EM-maskiner och där just trefasmatade såna har en särställning inte minst i Mikaels asynkronmotortråd. Denna visar enklaste fallet med en tvåpolig maskin inget skiljer mer än att vid fler poler ligger fler samhörande lindningar sekventiellt utefter statornperiferin och man får börja skilja sk elektriska grader från mekaniska dvs mekaniskt får man mindre ut per elektrisk alltså som nämnts lägre varvtal.
Den lilla animeringen länkad längre ner tar som jag tycker upp allt detta på ett bra sätt med alla aspekter snyggt inbakade och visuellt tydliga. Den är tom realistisk för vårt fall med en mer tekniskt korrekt bild av hur härvorna utbredda i statorspåren samverkar. Helt enligt högerhandsreglerna nämnda tidigare och med skolboksnomenklaturen dvs pilanalogin med kryss ström in i planet och spets ström ut mot betraktaren. Dessa visas sen per fas A-C med sin resulterande vektor i form av pulserande växlande fält låst i rummet med 120 grader mellan varandra, dessutom med en skara bidrag i luftgapet mot rotorn.
Kopplingen mellan det i tidplanet klassiska symmetriska trefassystemet med sina tre sinuskurvor som genererar magnetfält i de rumsligt symmetriskt placerade fältspolarna är tydlig. Att sen summan av dessa tre pulserande fält i rummet ger ett perfekt fält till belopp (konstant) och vinkelhastighet är tydligt och lättbegripligt i delen med den rosa summavektorn. Där den sen är flyttad till symboliken med motorn är det ännu tydligare med en fiktiv konstant magnetiserad spole som kan ses som en "roterande" statorspole med sitt i 90 grader vinkel genererade fält.
Just det resulterande flödet är vad som kan ge mekanisk effekt via rotor det som brukar kallas luftgapseffekt vid verkningsgradsbetraktelser på maskinerna. I stort vad som skiljer asynkronmotorn från en trafo är just att man tvingas ha ett luftgap mellan rotor och stator. Om man tänker sig en "Ohms lag" för magnetism är luft en mycket dålig ledare och järn av rätt typ en mycket bra. Därför ska gapet hållas minimalt för bra effektivitet, bara mekaniska avvägningar för lagringar, axel osv begränsar.
Nåväl vi får inte bli för långrandiga, här är den lilla animeringen: Roterande fält trefas
Den lilla animeringen länkad längre ner tar som jag tycker upp allt detta på ett bra sätt med alla aspekter snyggt inbakade och visuellt tydliga. Den är tom realistisk för vårt fall med en mer tekniskt korrekt bild av hur härvorna utbredda i statorspåren samverkar. Helt enligt högerhandsreglerna nämnda tidigare och med skolboksnomenklaturen dvs pilanalogin med kryss ström in i planet och spets ström ut mot betraktaren. Dessa visas sen per fas A-C med sin resulterande vektor i form av pulserande växlande fält låst i rummet med 120 grader mellan varandra, dessutom med en skara bidrag i luftgapet mot rotorn.
Kopplingen mellan det i tidplanet klassiska symmetriska trefassystemet med sina tre sinuskurvor som genererar magnetfält i de rumsligt symmetriskt placerade fältspolarna är tydlig. Att sen summan av dessa tre pulserande fält i rummet ger ett perfekt fält till belopp (konstant) och vinkelhastighet är tydligt och lättbegripligt i delen med den rosa summavektorn. Där den sen är flyttad till symboliken med motorn är det ännu tydligare med en fiktiv konstant magnetiserad spole som kan ses som en "roterande" statorspole med sitt i 90 grader vinkel genererade fält.
Just det resulterande flödet är vad som kan ge mekanisk effekt via rotor det som brukar kallas luftgapseffekt vid verkningsgradsbetraktelser på maskinerna. I stort vad som skiljer asynkronmotorn från en trafo är just att man tvingas ha ett luftgap mellan rotor och stator. Om man tänker sig en "Ohms lag" för magnetism är luft en mycket dålig ledare och järn av rätt typ en mycket bra. Därför ska gapet hållas minimalt för bra effektivitet, bara mekaniska avvägningar för lagringar, axel osv begränsar.
Nåväl vi får inte bli för långrandiga, här är den lilla animeringen: Roterande fält trefas
Asynkmotorer tillverkade (och därmed optimerade) för enfasdrift är normalt inte lindade likadant som trefas dito utan har en huvudlindning och en hjälplindning vinkelrät mot denna (som kondensatorn är ansluten till).Mikael_L skrev:
Just så är det ju. Visst är det denna typ av motor som är vanligast i kyl och frys-skåp t.ex?MagHam skrev:
Kanske överkurs då det är en gammal tillämpning, men visst finns det släpringade asynkronmotorer. En släpringad asynkronmotor är inte kortsluten. Det finns en möjlighet att via släpringarna koppla in ett seriemotstånd till rotorn för att få en mjukare start.Mikael_L skrev: