Hi,
First of all, sorry that I'm writing in english. I do not understand swedish and used google translator to get this far.") This forum seems to be alive enough so I decided to reg in to ask you guys a question.
This forum seems to be alive enough so I decided to reg in to ask you guys a question.
I bought Rob S600 and while it is winter I'm reading manual and getting ready to installation (after few months). I have two grass areas and Rob needs to travel through gravel to get from one area to another. One thing that I do not understand is how S600 understands when it is traveling on gravel path and when it is on grass area which needs to be cut?
Does it have something to do with width of traveling path. For example if path is made as narrow as possible then S600 understands that there is nothing cut or is there other logic in it?
Thanks, Joelly
First of all, sorry that I'm writing in english. I do not understand swedish and used google translator to get this far.
This forum seems to be alive enough so I decided to reg in to ask you guys a question.I bought Rob S600 and while it is winter I'm reading manual and getting ready to installation (after few months). I have two grass areas and Rob needs to travel through gravel to get from one area to another. One thing that I do not understand is how S600 understands when it is traveling on gravel path and when it is on grass area which needs to be cut?
Does it have something to do with width of traveling path. For example if path is made as narrow as possible then S600 understands that there is nothing cut or is there other logic in it?
Thanks, Joelly

The robot does not detect what kind of ground it's driving on. The Rob uses a guidecable for reaching a defined starting point, then it roams around the area even if it is driving on gravel.
The cutting motor is disabled until it reaches the starting point (on it's way out) and also when searching for the guidecable on it's way back to the charger.
The cutting motor is disabled until it reaches the starting point (on it's way out) and also when searching for the guidecable on it's way back to the charger.
Allvetare
· Västra Götaland
· 10 377 inlägg
Easiest is to let it cut the gravel just as if it were grass. If it's loose gravel you might have to make a more solid ground.
Thanks @etompau and @Johannes Carlsson. So guidecable should go from area 1 to area 2 and gravel is only for traveling from area to area. Should I then add area 2 as starting point when charger is in area 1?
Would it then cut area 2 and somehow understand when it should travel back to area 1 to cut there too. If traveling path is as thin as possible (minimum requirement) what is the probability it founds that thin pathway from area 2 to area 1. I understand that it will find the path when going back to charger by using guidecable but is there any way to force it to cut certain area..
Would it then cut area 2 and somehow understand when it should travel back to area 1 to cut there too. If traveling path is as thin as possible (minimum requirement) what is the probability it founds that thin pathway from area 2 to area 1. I understand that it will find the path when going back to charger by using guidecable but is there any way to force it to cut certain area..
The guidecable is used for forcing the robot to a specific starting point, when it reach this point (measuring distance in meters) it roams around without any references to areas/starting points. It can then, randomly, reach every part of the garden limited by the boundary cable
When voltage drops and its time to re-charge, it shut of it cutting motor and starts searching for the guidecable, and the returning to the charger.
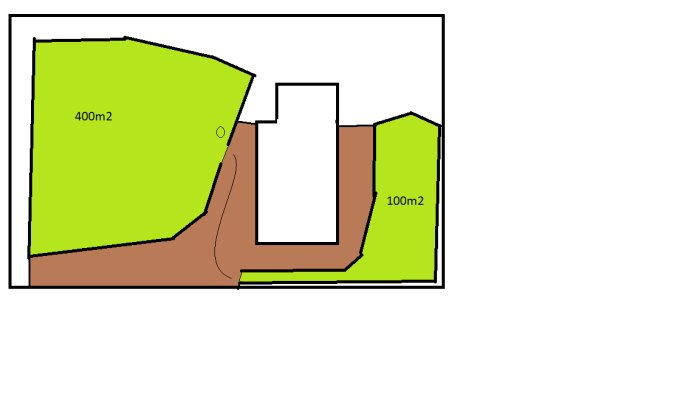
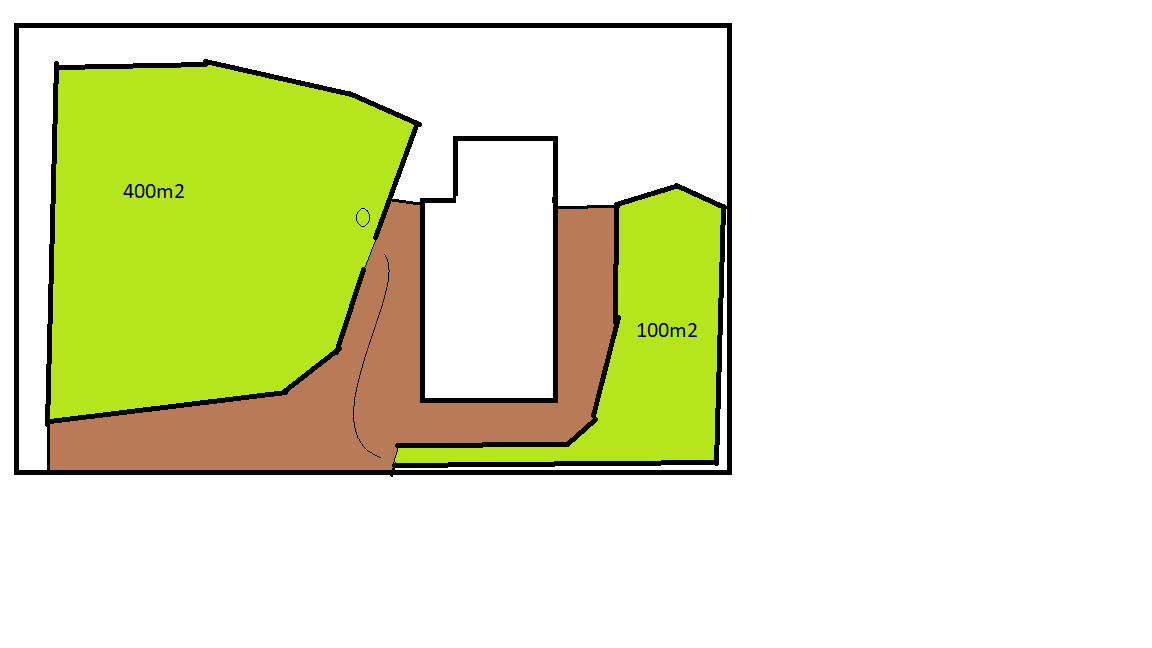
For more comments on your specific garden layout, make a drawing of it and upload it on the forum.
When voltage drops and its time to re-charge, it shut of it cutting motor and starts searching for the guidecable, and the returning to the charger.
For more comments on your specific garden layout, make a drawing of it and upload it on the forum.
Hi,
Here's picture.
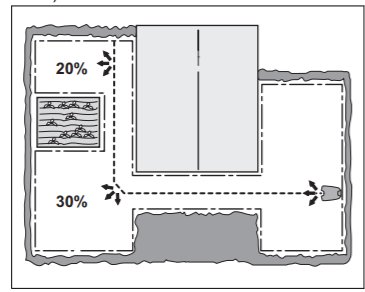
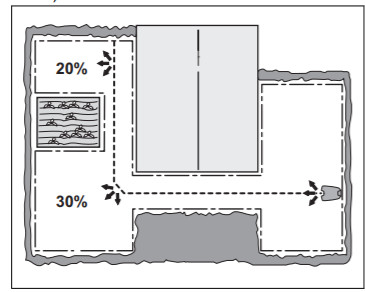
What about so-called "lawn coverage"?
"3.10.5 Lawn Coverage The Lawn Coverage function is used to guide the product to remote parts of the work area."
Should this be used?
Here's picture.
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
What about so-called "lawn coverage"?
"3.10.5 Lawn Coverage The Lawn Coverage function is used to guide the product to remote parts of the work area."
Should this be used?
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Lawn coverage refers to how often the robot should select the different start positions, expressed in percent.
Perhaps you should consider making the small area (100 m2) as a "secondary area", meaning you have to lift and place the robot yourself on the lawn. This is described in the manual.
If you include the "gravel area" there is a risk that the robot will scape from the cutting areas, through the small passing/gate.
One way to solve this is to make a passage over the gravel area, use the boundary cable to make a passage between the areas,. Still there is a risk that the robot enters the passage when cutting, but the guidecable will guide the robot back to the charger when recharging is needed.
Also, note that the spec. says that the robot should not drive on gravel. So take this into consideration.
Perhaps you should consider making the small area (100 m2) as a "secondary area", meaning you have to lift and place the robot yourself on the lawn. This is described in the manual.
If you include the "gravel area" there is a risk that the robot will scape from the cutting areas, through the small passing/gate.
One way to solve this is to make a passage over the gravel area, use the boundary cable to make a passage between the areas,. Still there is a risk that the robot enters the passage when cutting, but the guidecable will guide the robot back to the charger when recharging is needed.
Also, note that the spec. says that the robot should not drive on gravel. So take this into consideration.
Redigerat:
Allvetare
· Västra Götaland
· 10 377 inlägg
If the gravel is compact, no problem. If it's loose, then maybe it can't drive there anyway
Allvetare
· Västra Götaland
· 10 377 inlägg
I say just pretend the gravel is grass and it will work fine and cut it all
Hi. I do not quite understand lawn coverage settings.E etompau skrev:
In menu I can choose area1, percentage and choose add or prevent/deny?
What does those settings mean and how should it work.
In Finnish it looks like this:
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Heading says: ALUE1 = Area1
Kuinka? = How?
Haku = Search
Kuinka usein? = How often?
Estä = Prevent/deny
Lisää = Add
I have two main grass areas connected with path where area1 is 40% and area2 is 60%. With default settings (no lawn coverage settings) my robot seems to spend most of the time in area2 which is okay but I'm not sure if it understands that area1 needs to be taken care too. I do not understand what area1 = 40% does and what happens if I set it to let's say 90%..
Can someone help me..
Ok, did find some information:
https://www.byggahus.se/forum/threads/aendra-klippning-foer-omrade-2-och-3.346513/page-3
What a fucking joke. Mculloch copy-pastes manuals without understanding that their device do not support "remote areas".
https://www.byggahus.se/forum/threads/aendra-klippning-foer-omrade-2-och-3.346513/page-3
What a fucking joke. Mculloch copy-pastes manuals without understanding that their device do not support "remote areas".
Just read this thread and I have a thought about the transition over the gravel. Would it be possible (and aesthetic) for you to make a paved path over the gravel? If you make this path over 60 cm wide and put the boundary wire under the paving Rob will run over it without risk of damaging the knifes or getting stuck.
(The lawn coverage is a mystery... but in theory it's great! )
(The lawn coverage is a mystery...
but in theory it's great! )Actually now that i have tested how it runs it handles gravel great. Of course it does not understand when it is on gravel and when on grass so it tries to cut in both. At The moment blades do not hit gravel because Im using 6cm trim. Gravel is quite compact so Im guessing that there shouldnt be any issues even when using lower trim than 6cm.P Paxman skrev:Just read this thread and I have a thought about the transition over the gravel. Would it be possible (and aesthetic) for you to make a paved path over the gravel? If you make this path over 60 cm wide and put the boundary wire under the paving Rob will run over it without risk of damaging the knifes or getting stuck.
(The lawn coverage is a mystery...