Utvärdering av första helgen med klipparen:
Jag har fått springa en hel del efter klipparen under helgen. Det har mestadels berott på hur slingan varit dragen, samt hur väl (läs dåligt) den klarar att skråa i stora lutningar (över 30 grader). Efter att ha ha gjort dessa passager lite enklare för klipparen så kan jag nu köra igång den på auto, den kör då tills den behöver ladda, och hittar sedan hem till laddaren, so far so good. Däremot kan jag inte schemalägga den eftersom jag har följande problem: om jag skappar en memory point på slingan (vilken den behöver åtminstonde en för schemaläggning). Så svänger den åt fel håll när den kommer till punkten!
Dvs den svänger ut i häcken, skogen, uppfarten, grusgången etc och kör fast, istället för att svänga av inåt till det avgränsade området. Jag har provat att skapa memory pointsen genom att köra både med och motsols, samt att polvända slingan, men inget av detta verkar hjälpa. Jag har även brutit strömmen till laddaren samt huvudbrytare på klipparen emellan försöken efter att ha läst igenom S510 tråden. Detta gör att litegrann av vitsen med en robotklippare försvinner när jag inte kan schemalägga den ... Hoppas att det går att lösa på något sätt. Jag får ställa frågan i S510 tråden också. Jag hade stora problem att få den att följa slingan öht i början. Jag mätte då upp slingan, och märkte att den låg på ca 90 mA den skulle ligga på 330 mA. Detta var som tur väl var ganska lätt att justera mha en skruv i basstationen, men det verkar som om att den varierar upp och ner väldigt mycket, fick justera den igen nästa dag ....
Sammanfattningsvis:
+ Tyst. Drivmotorerna hörs inte alls, och suset från knivdisken låter inte så särskilt mycket. Jag hör den ej när den försvinner runt en knut, buske etc. Där det är ojämnt i gräsmattan så skramlar det dock en hel del i skyddskåpan, vilken verkar fjädra lite för lätt, och dunkar när den bottnar.
+ Snabb, den har ju en god kapacitet tack vare sin hastighet.
+ Bra klättringsförmåga (Om den kommer rakt mot backen)
- Generellt dåligt AI. Lutningskompensation verkar inte fungera något vidare trots att den har inbyggd kompass. När den vänder på linan så verkar den inte basera sin rotation på kompassen, utan på hur mycket hjulen ska snurra, detta leder till att den (om den står och slirar på något) försöker köra rakt över slingan igen, eller hamnar på fel sida slingan i värsta fall.
- Okänsliga krocksensorer. Ofta när den kör in i något så står den och slirar mot det/knuffar det utan att den verkar ha förstått att den kört på något. Känns inte jättebra när man har småbarn. Den körde på en bobbycar i sidan i lördags, då knuffade den bobbycaren tvärs över hela gräsmattan, ca 15 meter ...
Jag önskar att jag hade läst igenom hela S510 tråden innan jag beställde den här. I den verkar alla ha en stor acceptans för hur klipparen beter sig. Jag förväntade mig inte heller att det skulle vara en husqvarna och beställde den lite på chans, men jag har ju inte lust att betala för att bli Beta-testare åt en trög utvecklingsgrupp i kina.
Största problemet är dock detta med memory pointsen. Om jag kunde schemalägga den ivf så kunde jag ju reda ut lite kinks eftersom och se om jag får lite bättre ordning på den.
Om jag hade haft obegränsatt med tid så hade den blivit ämne till en ardumower. Så jag kunde ge den lite bättre AI ...
Jag har inte gett upp än, men det känns inget vidare än så länge.
Jag har fått springa en hel del efter klipparen under helgen. Det har mestadels berott på hur slingan varit dragen, samt hur väl (läs dåligt) den klarar att skråa i stora lutningar (över 30 grader). Efter att ha ha gjort dessa passager lite enklare för klipparen så kan jag nu köra igång den på auto, den kör då tills den behöver ladda, och hittar sedan hem till laddaren, so far so good. Däremot kan jag inte schemalägga den eftersom jag har följande problem: om jag skappar en memory point på slingan (vilken den behöver åtminstonde en för schemaläggning). Så svänger den åt fel håll när den kommer till punkten!
Dvs den svänger ut i häcken, skogen, uppfarten, grusgången etc och kör fast, istället för att svänga av inåt till det avgränsade området. Jag har provat att skapa memory pointsen genom att köra både med och motsols, samt att polvända slingan, men inget av detta verkar hjälpa. Jag har även brutit strömmen till laddaren samt huvudbrytare på klipparen emellan försöken efter att ha läst igenom S510 tråden. Detta gör att litegrann av vitsen med en robotklippare försvinner när jag inte kan schemalägga den ... Hoppas att det går att lösa på något sätt. Jag får ställa frågan i S510 tråden också. Jag hade stora problem att få den att följa slingan öht i början. Jag mätte då upp slingan, och märkte att den låg på ca 90 mA den skulle ligga på 330 mA. Detta var som tur väl var ganska lätt att justera mha en skruv i basstationen, men det verkar som om att den varierar upp och ner väldigt mycket, fick justera den igen nästa dag ....
Sammanfattningsvis:
+ Tyst. Drivmotorerna hörs inte alls, och suset från knivdisken låter inte så särskilt mycket. Jag hör den ej när den försvinner runt en knut, buske etc. Där det är ojämnt i gräsmattan så skramlar det dock en hel del i skyddskåpan, vilken verkar fjädra lite för lätt, och dunkar när den bottnar.
+ Snabb, den har ju en god kapacitet tack vare sin hastighet.
+ Bra klättringsförmåga (Om den kommer rakt mot backen)
- Generellt dåligt AI. Lutningskompensation verkar inte fungera något vidare trots att den har inbyggd kompass. När den vänder på linan så verkar den inte basera sin rotation på kompassen, utan på hur mycket hjulen ska snurra, detta leder till att den (om den står och slirar på något) försöker köra rakt över slingan igen, eller hamnar på fel sida slingan i värsta fall.
- Okänsliga krocksensorer. Ofta när den kör in i något så står den och slirar mot det/knuffar det utan att den verkar ha förstått att den kört på något. Känns inte jättebra när man har småbarn. Den körde på en bobbycar i sidan i lördags, då knuffade den bobbycaren tvärs över hela gräsmattan, ca 15 meter ...
Jag önskar att jag hade läst igenom hela S510 tråden innan jag beställde den här. I den verkar alla ha en stor acceptans för hur klipparen beter sig. Jag förväntade mig inte heller att det skulle vara en husqvarna och beställde den lite på chans, men jag har ju inte lust att betala för att bli Beta-testare åt en trög utvecklingsgrupp i kina.
Största problemet är dock detta med memory pointsen. Om jag kunde schemalägga den ivf så kunde jag ju reda ut lite kinks eftersom och se om jag får lite bättre ordning på den.
Om jag hade haft obegränsatt med tid så hade den blivit ämne till en ardumower. Så jag kunde ge den lite bättre AI ...
Jag har inte gett upp än, men det känns inget vidare än så länge.
Jag har fått igång min nu också.
Har haft lite problem med att få till slingan bra och placeringen av laddstationen blev inget bra. Så jag får ändra den imorgon.
I övrigt verkar den fungera bra på Auto.
Jag håller med Hjalmad om att trycksensorerna kunde varit lite känsligare. Barnens leksaker kommer nog puttas runt en del på gräsmattan framöver.
Jag har råkat ut för att den kan fastna med bakhjulen i saker (de sticker ut en aning åt sidan) och att den blir stående.
Jag har en ganska plan gräsmatta så jag har ingen uppfattning om hur det fungerar när den lutar.
Jag ska testa ställa in memorypoints till helgen kanske, hoppas att det fungerar bättre hos mig.
Har du fått någon rätsida på det ännu? Det låter inte så bra att den ger sig utåt.
Jag stötte på ett problem nu på kvällen. När den stannat av någon anledning har jag problem med att få den att köra igen. Klickar jag t.ex. på Auto och Yes hoppar programmet bara tillbaka till ursprungsläget, det hjälper inte att starta om den utan efter ett tag verkar den bara fungera igen. Hoppas detta bara är något tillfälligt.
Har haft lite problem med att få till slingan bra och placeringen av laddstationen blev inget bra. Så jag får ändra den imorgon.
I övrigt verkar den fungera bra på Auto.
Jag håller med Hjalmad om att trycksensorerna kunde varit lite känsligare. Barnens leksaker kommer nog puttas runt en del på gräsmattan framöver.
Jag har råkat ut för att den kan fastna med bakhjulen i saker (de sticker ut en aning åt sidan) och att den blir stående.
Jag har en ganska plan gräsmatta så jag har ingen uppfattning om hur det fungerar när den lutar.
Jag ska testa ställa in memorypoints till helgen kanske, hoppas att det fungerar bättre hos mig.
Har du fått någon rätsida på det ännu? Det låter inte så bra att den ger sig utåt.
Jag stötte på ett problem nu på kvällen. När den stannat av någon anledning har jag problem med att få den att köra igen. Klickar jag t.ex. på Auto och Yes hoppar programmet bara tillbaka till ursprungsläget, det hjälper inte att starta om den utan efter ett tag verkar den bara fungera igen. Hoppas detta bara är något tillfälligt.
Det var visst ett handhavandefel ;-)
Hade dragit ut medsolsslingan för långt längsmed laddstationen. När den startar på schema och ska köra till sin startpunkt så ska den vända 180 grader och börja motsols. Eftersom medsolsslingan var så långt utdragen så fastnade den på den istället och startade alltså åt fel håll. (Ska vara max 1 meter rakt ut) Eftersom jag inte visste att den skulle starta motsols, så tog det ett tag innan jag förstod att det var orsaken. En liten justering löste problemet.
Hade dragit ut medsolsslingan för långt längsmed laddstationen. När den startar på schema och ska köra till sin startpunkt så ska den vända 180 grader och börja motsols. Eftersom medsolsslingan var så långt utdragen så fastnade den på den istället och startade alltså åt fel håll. (Ska vara max 1 meter rakt ut) Eftersom jag inte visste att den skulle starta motsols, så tog det ett tag innan jag förstod att det var orsaken. En liten justering löste problemet.
Hej alla,
Äntligen installerad och provkörd") .
.
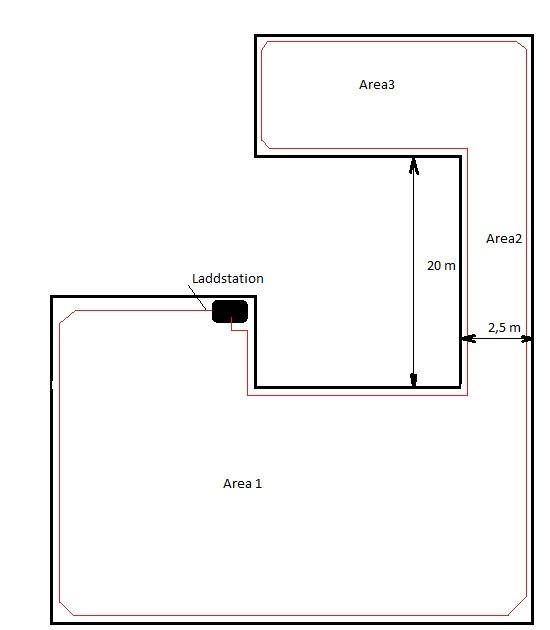
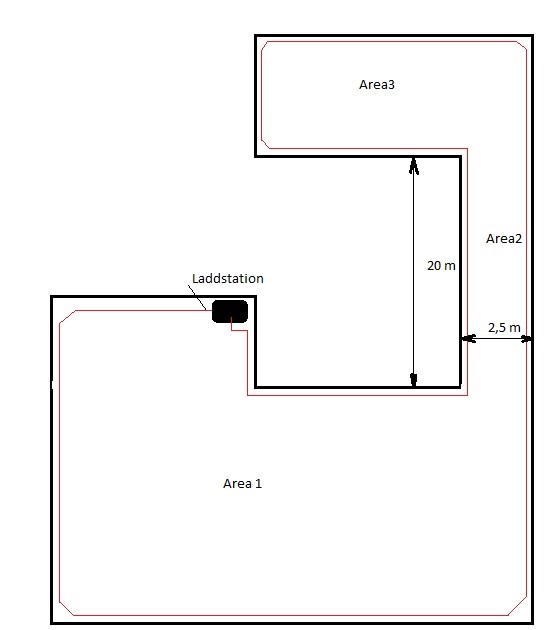
Inget direkt negativt att säga om klipparen. Allt fungerade som förväntat, det var enkelt att ställa in alla parametrar och programmera klippningen. Klipparen gick ut och ”klippte gräset” enligt schemat. Just nu har jag bara lite gräs på ”Area2” (södra sidan, se bifogad bild), men det räckte till för att kunna bedöma ljudnivå som jag var väldigt intresserad av. Den överträffar alla mina förväntningar, det som hörs är bara susande ljud som knappt hörs på 3-4 m avstånd. Det ända som låter lite mer är skalet när klipparen kör över små gropar och skavanker (men det är gräsmattans förtjänst). Inga konstigheter heller när den skulle ut och klippa eller när den svänger 180gr för att hitta memorerade punkter för olika areor.
Nu har jag en fråga för någon som kan detta. Jag har nämligen svårt att hålla klipparen på Area2, arean är väldigt smal och klipparen studsar bara från den ena långsida till det andra och efter en tid lämnar den arean. Kan man göra om kabeldragningen på något sätt för att bättre markera areans tänkta gränser?
Tacksam för lite experthjälp.
Äntligen installerad och provkörd
.Inget direkt negativt att säga om klipparen. Allt fungerade som förväntat, det var enkelt att ställa in alla parametrar och programmera klippningen. Klipparen gick ut och ”klippte gräset” enligt schemat. Just nu har jag bara lite gräs på ”Area2” (södra sidan, se bifogad bild), men det räckte till för att kunna bedöma ljudnivå som jag var väldigt intresserad av. Den överträffar alla mina förväntningar, det som hörs är bara susande ljud som knappt hörs på 3-4 m avstånd. Det ända som låter lite mer är skalet när klipparen kör över små gropar och skavanker (men det är gräsmattans förtjänst). Inga konstigheter heller när den skulle ut och klippa eller när den svänger 180gr för att hitta memorerade punkter för olika areor.
Nu har jag en fråga för någon som kan detta. Jag har nämligen svårt att hålla klipparen på Area2, arean är väldigt smal och klipparen studsar bara från den ena långsida till det andra och efter en tid lämnar den arean. Kan man göra om kabeldragningen på något sätt för att bättre markera areans tänkta gränser?
Tacksam för lite experthjälp.
Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
Hej Borro,
Ja, ett tips är att du gör en liten "tarm" ut från området där area 1 och area 3 ansluter till area2. Så att Area2 blir bättre "inklämd". Det räcker med att det är 50cm smalt in till area2. Då kommer det vara mindre risk att den slumpmässigt hittar ut ur area2 när den klipper där.
Joacim
Ja, ett tips är att du gör en liten "tarm" ut från området där area 1 och area 3 ansluter till area2. Så att Area2 blir bättre "inklämd". Det räcker med att det är 50cm smalt in till area2. Då kommer det vara mindre risk att den slumpmässigt hittar ut ur area2 när den klipper där.
Joacim
Hej
Min far har köpt sig denna maskin. Det har väl varit allt än positivt än så länge. Sätter du den på auto så söker den upp gränstråden. Sedan kör den efter gränstråden och plötsligt på samma ställe (de sista 20m innan laddningsstationen) åker den av och in i klippområdet. Där den åker av är det "lite" lutning åt sidan, men tråden ligger spikrakt.
När den väl åker av, kör den runt i området och söker upp gränstråden igen, och gör samma sak. Det innebär att den klipper inte i klippområdet utan åker runt och gör exakt samma sak. Det innebär också att den aldrig kommer till laddningsstationen.
Sedan problem nummer två: Ibland har den åkt runt i klippområdet och sökt efter gränstråden. Så kommer den fram till tråden och stannar. Total dör, den är igång men klipper inte. Du kan inte reset:a den på något vis. Bära tillbaka den till laddningsstationen och låta den vara i ett par timmar funkar. (Nej batteriet är inte slut när det händer)
Ringde supporten på Outl1 idag. Killen hade tydligen samma klippare. Han menade att den inte kan gå i lutning som gör att den lutar lite i sid leds. Känns ju så där? De beskriver ju klipparen som en otroligt utvecklad och bra produkt.
Instruktionsboken till Tianchen är ju även den en katastrof. I det här läget får man verkligen vad man betalar för.
Min far har köpt sig denna maskin. Det har väl varit allt än positivt än så länge. Sätter du den på auto så söker den upp gränstråden. Sedan kör den efter gränstråden och plötsligt på samma ställe (de sista 20m innan laddningsstationen) åker den av och in i klippområdet. Där den åker av är det "lite" lutning åt sidan, men tråden ligger spikrakt.
När den väl åker av, kör den runt i området och söker upp gränstråden igen, och gör samma sak. Det innebär att den klipper inte i klippområdet utan åker runt och gör exakt samma sak. Det innebär också att den aldrig kommer till laddningsstationen.
Sedan problem nummer två: Ibland har den åkt runt i klippområdet och sökt efter gränstråden. Så kommer den fram till tråden och stannar. Total dör, den är igång men klipper inte. Du kan inte reset:a den på något vis. Bära tillbaka den till laddningsstationen och låta den vara i ett par timmar funkar. (Nej batteriet är inte slut när det händer)
Ringde supporten på Outl1 idag. Killen hade tydligen samma klippare. Han menade att den inte kan gå i lutning som gör att den lutar lite i sid leds. Känns ju så där? De beskriver ju klipparen som en otroligt utvecklad och bra produkt.
Instruktionsboken till Tianchen är ju även den en katastrof. I det här läget får man verkligen vad man betalar för.
Hej Ckuz, Det var nog mig du pratade med.
Jag hittade denna tråd så jag tänkte att jag hjälper gärna till att svara på frågor här.
Ang. lutningen så är det just när den går längst kabeln den kan ha problem om det är blött i gräset, eller om lutningen är brant. Om det då också är en sväng mitt i lutningen så kan det hända att den "sladdar" bort från kabeln i svängen, och då hamnar utanför i det hala gräset. Jag tror inte att det problemet är unikt för Tianchen, utan att det gäller de flesta robotar som använder gränskabel.
Ang. problem nummer två, så beror det på att kabeln ligger för djupt på det stället. När roboten ska tillbaka till laddstationen och är "trött" så är den mer känslig för att gå på kabeln, vilket troligtvis beror på att den har låg batterinivå. Det löser du genom att inte gräva ned kabeln så djupt.
Instruktionsboken är inte den bästa, det kan jag hålla med om. Om du tittar i den som finns på vår hemsida så är den på svenska, och där är några av språkmissarna rättade.
Jag hittade denna tråd så jag tänkte att jag hjälper gärna till att svara på frågor här.
Ang. lutningen så är det just när den går längst kabeln den kan ha problem om det är blött i gräset, eller om lutningen är brant. Om det då också är en sväng mitt i lutningen så kan det hända att den "sladdar" bort från kabeln i svängen, och då hamnar utanför i det hala gräset. Jag tror inte att det problemet är unikt för Tianchen, utan att det gäller de flesta robotar som använder gränskabel.
Ang. problem nummer två, så beror det på att kabeln ligger för djupt på det stället. När roboten ska tillbaka till laddstationen och är "trött" så är den mer känslig för att gå på kabeln, vilket troligtvis beror på att den har låg batterinivå. Det löser du genom att inte gräva ned kabeln så djupt.
Instruktionsboken är inte den bästa, det kan jag hålla med om. Om du tittar i den som finns på vår hemsida så är den på svenska, och där är några av språkmissarna rättade.
Hej! Tack för att du faktiskt tog dig hit. Tror att det kan vara en del som vill ha hjälp med dessa maskiner.byggadromhus skrev:Hej Ckuz, Det var nog mig du pratade med.
Jag hittade denna tråd så jag tänkte att jag hjälper gärna till att svara på frågor här.
Ang. lutningen så är det just när den går längst kabeln den kan ha problem om det är blött i gräset, eller om lutningen är brant. Om det då också är en sväng mitt i lutningen så kan det hända att den "sladdar" bort från kabeln i svängen, och då hamnar utanför i det hala gräset. Jag tror inte att det problemet är unikt för Tianchen, utan att det gäller de flesta robotar som använder gränskabel.
Ang. problem nummer två, så beror det på att kabeln ligger för djupt på det stället. När roboten ska tillbaka till laddstationen och är "trött" så är den mer känslig för att gå på kabeln, vilket troligtvis beror på att den har låg batterinivå. Det löser du genom att inte gräva ned kabeln så djupt.
Instruktionsboken är inte den bästa, det kan jag hålla med om. Om du tittar i den som finns på vår hemsida så är den på svenska, och där är några av språkmissarna rättade.
Det var inte mig du pratade med utan det var min gamle far. Vi skall dock lägga om gränstråden. Men jag står fast vid att det är dåligt att den inte tar lite lutning. Det är verkligen ytterst lite sidlutning. Vi pratar någon grad eller så.
Men löser tråd omläggningen detta så är det ju bra, mindre bra dock att man måste ut och klippa manuellt eftersom det kommer bli ~40m2 som inte blir klippt av roboten där det lutar.
Men saken är den, att åker roboten av och du plockar upp den. Sedan ställer den tillbaka på gränstråden (Strax innan där den åkte av) så åker den felfritt över det området. Det är som om den får fnatt av att åka för länge på tråden?
Jag lägger upp en bild på hur det ser ut.
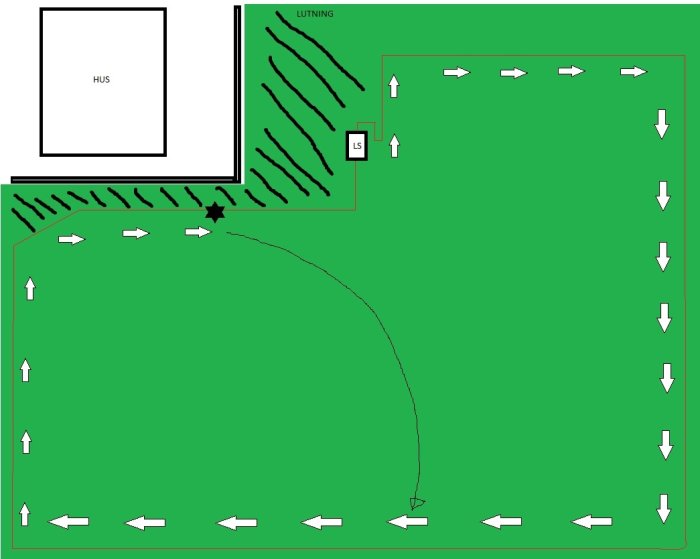
LS = Laddningsstationen
Den svarta strecket jag dragit är den banan den åker för att hitta gränstråden igen. Och upprepa sig, om och om. Men som jag skrev, lyfter man upp den och ställer tillbaka den på tråden lite innan där stjärnan är och trycker på "Hem knappen" så kör den längs den biten utan problem.
Jag funderar på om man istället skall flytta laddningstationen dit stjärnan är och testa? Det är lite lutning, men knapp märkbar.
Kan även filma hur den beter sig. Kanske enklast?

Inloggade ser högupplösta bilder
Logga in
Skapa konto
Gratis och tar endast 30 sekunder
LS = Laddningsstationen
Den svarta strecket jag dragit är den banan den åker för att hitta gränstråden igen. Och upprepa sig, om och om. Men som jag skrev, lyfter man upp den och ställer tillbaka den på tråden lite innan där stjärnan är och trycker på "Hem knappen" så kör den längs den biten utan problem.
Jag funderar på om man istället skall flytta laddningstationen dit stjärnan är och testa? Det är lite lutning, men knapp märkbar.
Kan även filma hur den beter sig. Kanske enklast?
Ställer du av den vid ungefär samma tid på dygnet? Mängden fukt (dagg/regn) i gräset har nämligen stor betydelse för hur bra robotar kan ta sig fram. Det kan ju vara precis så att det är på gränsen att den åker av, och därför åker den bara av ibland på det stället? Om du mailar mig privat bilder på hur det ser ut i området, eller till vår support-mail så kan jag kanske komma med lite ideer om jag ser något man kan göra?Ckruz skrev:
När roboten försöker gå rakt fram, så kan även en liten tova ställa till det om den går på snedden där det sluttar. Det är det svåraste scenariot för roboten att ta sig fram i, eftersom den måste försöka kompensera både lutningen, halt gräs och eventuella tovor/hål i gräsmattan som kan påverka. Ett tips (om du inte redan gjort det) kan vara att lägga lite toppdress jord på stället där det är problem, för att se om det hjälper?
Skicka annars jättegärna en filmsnutt till mig över wetransfer.com (gratis fildelningstjänst utan login) så ska jag kolla om jag ser något.
Skicka annars jättegärna en filmsnutt till mig över wetransfer.com (gratis fildelningstjänst utan login) så ska jag kolla om jag ser något.
Håller på att lägga slinga runt en ganska "svår" tomt. Jag har kopplat en ledning provisoriskt tvärsöver ung halva tomten för att testa och försöker där få klipparen att klippa ut över den nergrävda slingan (läge 4 på "Range). Har någon annat testat detta och fått det att fungera? Det är kanske tanken att denna "kantklippning" ska ske när klipparen går ut från laddstationen men så uppfattade jag inte beskrivningen i reklamen...